Output Devices: Motors, Actuators, Lights
Making Things Move #
How to Choose the Right Motor or Actuator? #
How to work with motors and other actuators? #
I have created tutorials for different types of actuators.
Using Transistors #
Transistors are very useful little components that can be used in many different ways. We are not going to go very deep into the details how transistors work. We are basically only going to use transistors (NPN) as switches, but keep in mind that it is not the only way to use a transistor.
If you want to learn more details, see this tutorial:

The way my electronics teacher taught how to remember which of the schematic symbols is NPN and which one is PNP:
- NPN = Never Point iN
- PNP = Point iN Please
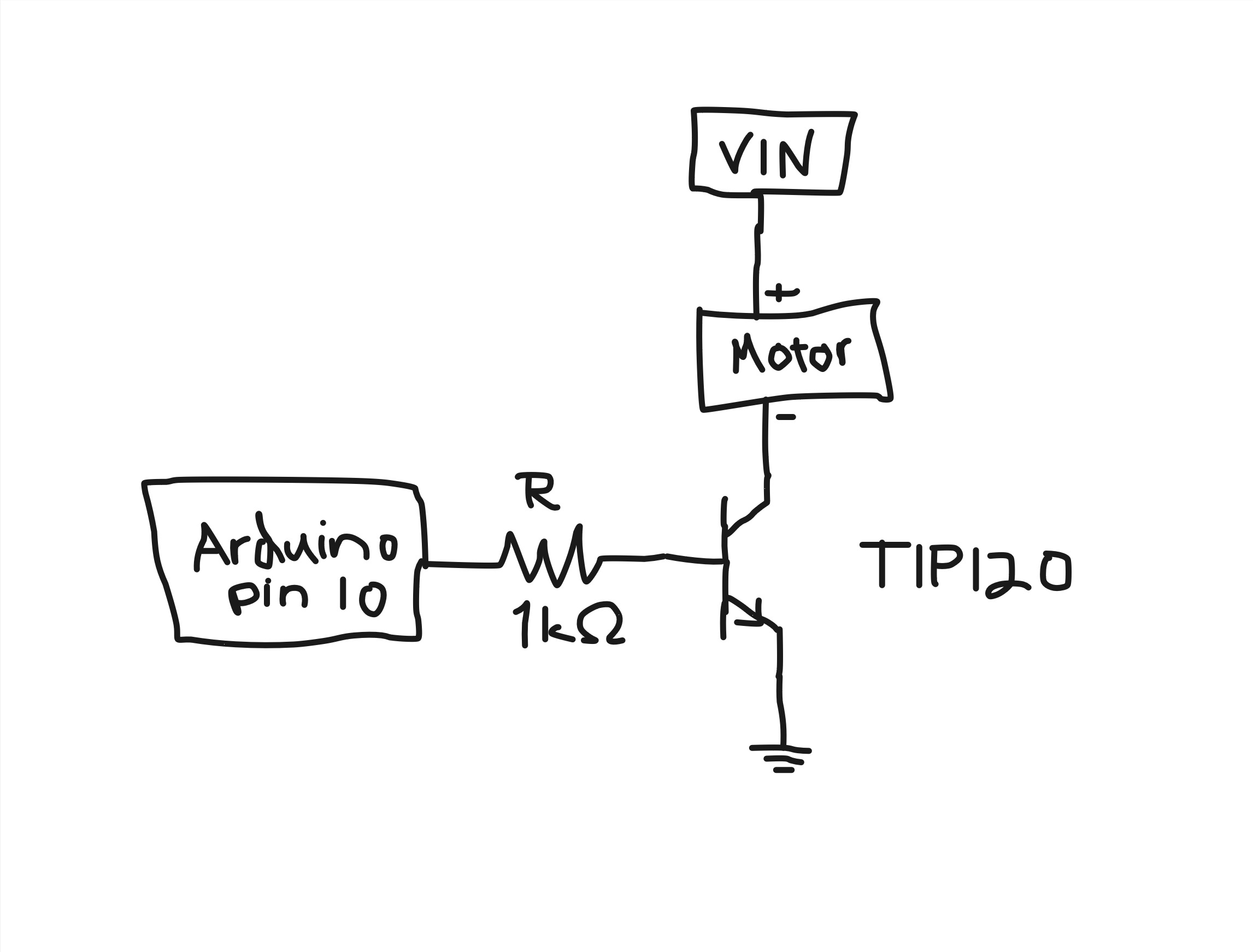
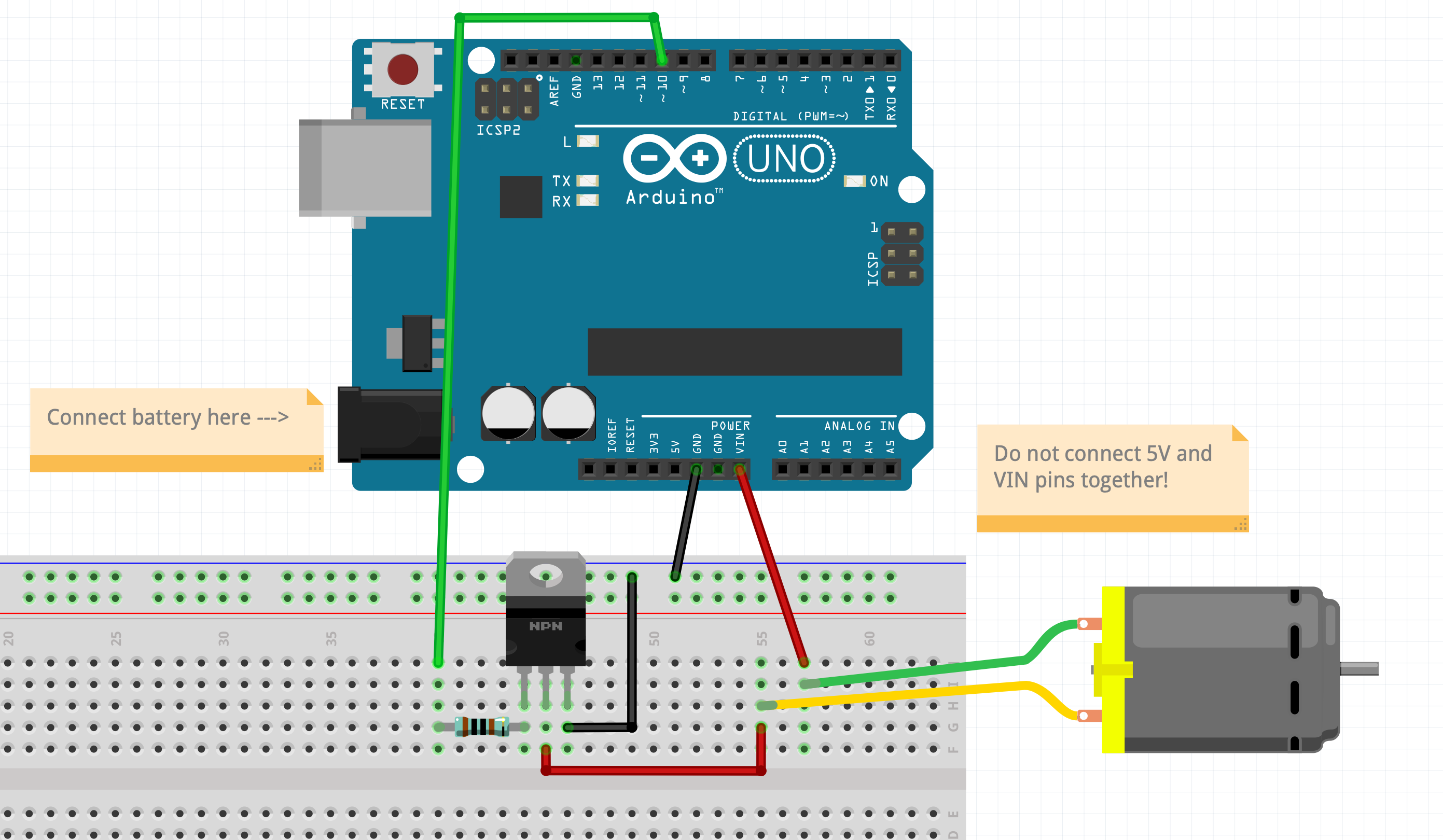
NPN Transistor #
When you use an NPN transistor as a switch, the load that you want to switch (lights, motor etc.) needs to be between the positive voltage pin and the collector. This is called a low-side switch, since the transistor is on the low (ground) side of the circuit.
Always connect the thing that you want to switch on/off to the collector side with the NPN transistor.
The base turns the switch on or off. In our case the base pin would be often connected to one of the Arduino pins.
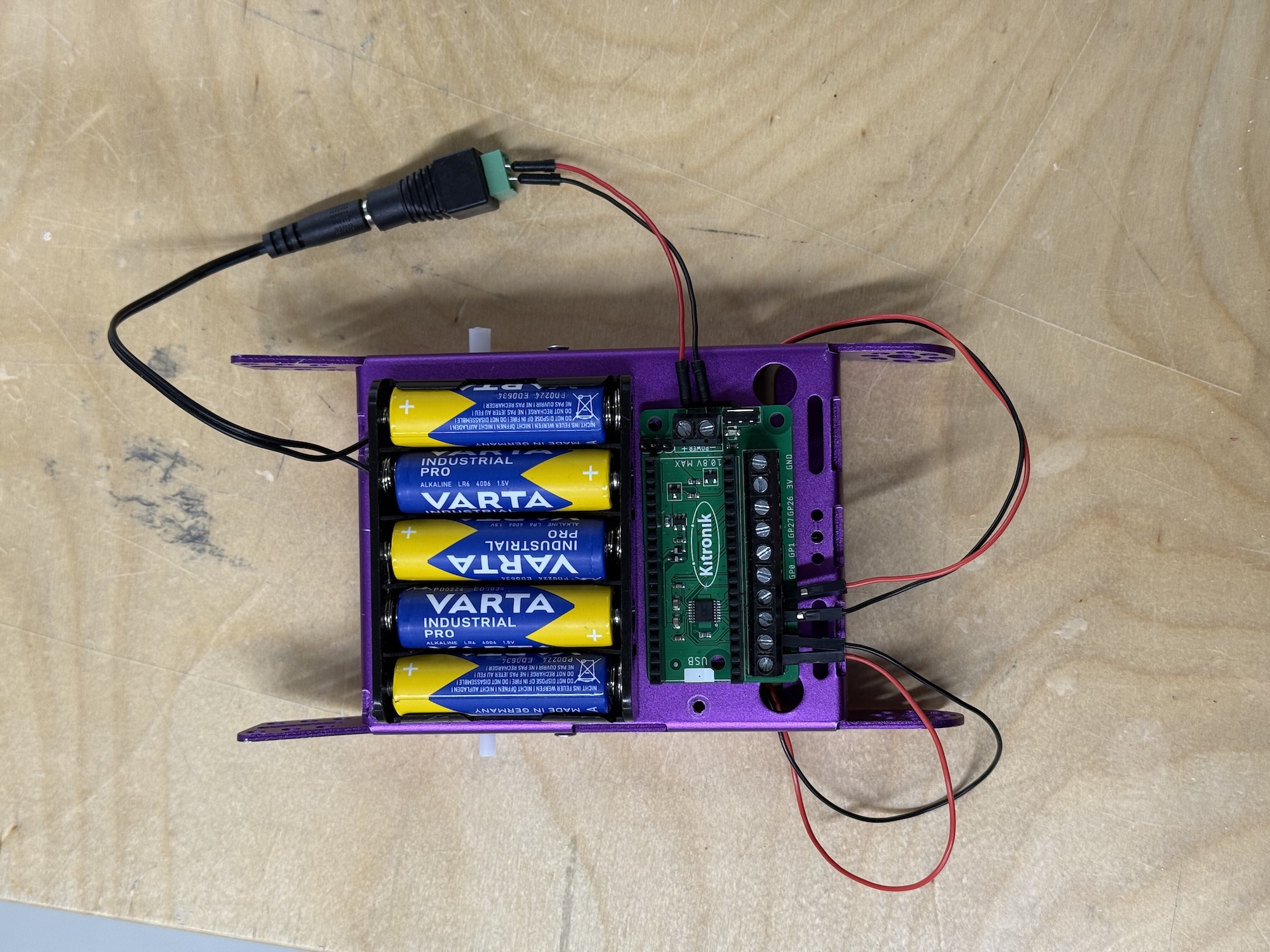
Using the Kitronik Motor Driver Board for Raspberry Pi Pico #
Your kits include a handy motor controller shield for the Raspberry Pi Pico that allows us to connect to DC motors to the Pico.
Example #
Setup:
- Connect the two yellow TT Motors (DC Motors) to the purple robot chassis. (4 x M3x25 screws, 4 x M3 nut)
- Run the cables of the motrs through the L-shpaed holes on the chassis.
- Screw the cables of the motors to the connectors on the motor board. (MOTOR1 and MOTOR 2). PLEASE NOTE THE ORDER OF THE WIRES! CONNECT THEM THIS WAY SO THAT THE PINS ON THE EXAMPLE CODE MATCH.
- Use the velcro stickers to attach the board on top of the chassis.
- Screw the Battery Pack to the chassis as well (take out one battery to reveal the hole for the screw).
- Attach your Pico on top of the Motor Driver board. PLEASE NOTE THE ORIENTATION. THERE IS A LABEL THAT SAYS USB ON THE MOTOR DRIVER.
- Connect the Screw-On DC Terminal to the Motor Driver Board and plug-in the battery pack.
The final result should look like this:
Code:
Working with addressable digital LEDs (Neopixels) #
I have made a simple tutorial and some examples here.
Neopixel is a brand name by Adafruit for certain types of addressable LEDs.
Examples done in class #
Accelerometer to Servo #
Code #
// Basic demo for accelerometer readings from Adafruit MSA301
#include <Wire.h>
#include <Adafruit_MSA301.h>
#include <Adafruit_Sensor.h>
#include <Servo.h>
Adafruit_MSA301 msa;
Servo myServo;
// variable to store the servo position
int pos = 0;
void setup(void) {
Serial.begin(115200);
msa.begin();
myServo.attach(9);
}
void loop() {
// get X Y and Z data at once
msa.read();
// Then print out the raw data
Serial.print("X: "); Serial.print(msa.x);
Serial.print(" Y: "); Serial.print(msa.y);
Serial.print(" Z: "); Serial.print(msa.z);
Serial.println();
pos = map(msa.x, -2100, 2100, 0, 180);
myServo.write(pos);
delay(5);
}