Distance | HC-SR04
The HC-SR04 is a low-cost ultrasonic ranging sensor for measuring distances between 2–400cm. It is not the most accurate sensor and it can give a bit erratic readings sometimes, especially when the detected object is soft and uneven. It still does a fairly good job in most cases when you need to know how far a person or an object is from your sensor.
Features #
- Operating Voltage: 5V DC
- Operating Current: 15mA
- Measure Angle: 15°
- Ranging Distance: 2cm – 4m
How does it work? #
There are two ultrasonic transducers on the sensor board. One of them (connected to the trigger pin) is used to transmit a pulse, and the other one (connected to the echo pin) reads the reflected sound wave.
Since we know the speed of sound (about 343 m/s), it is possible to calculate the distance of the object based on the time that it took for the wave to get reflected back to the sensor.
How to Use It With the Arduino? #
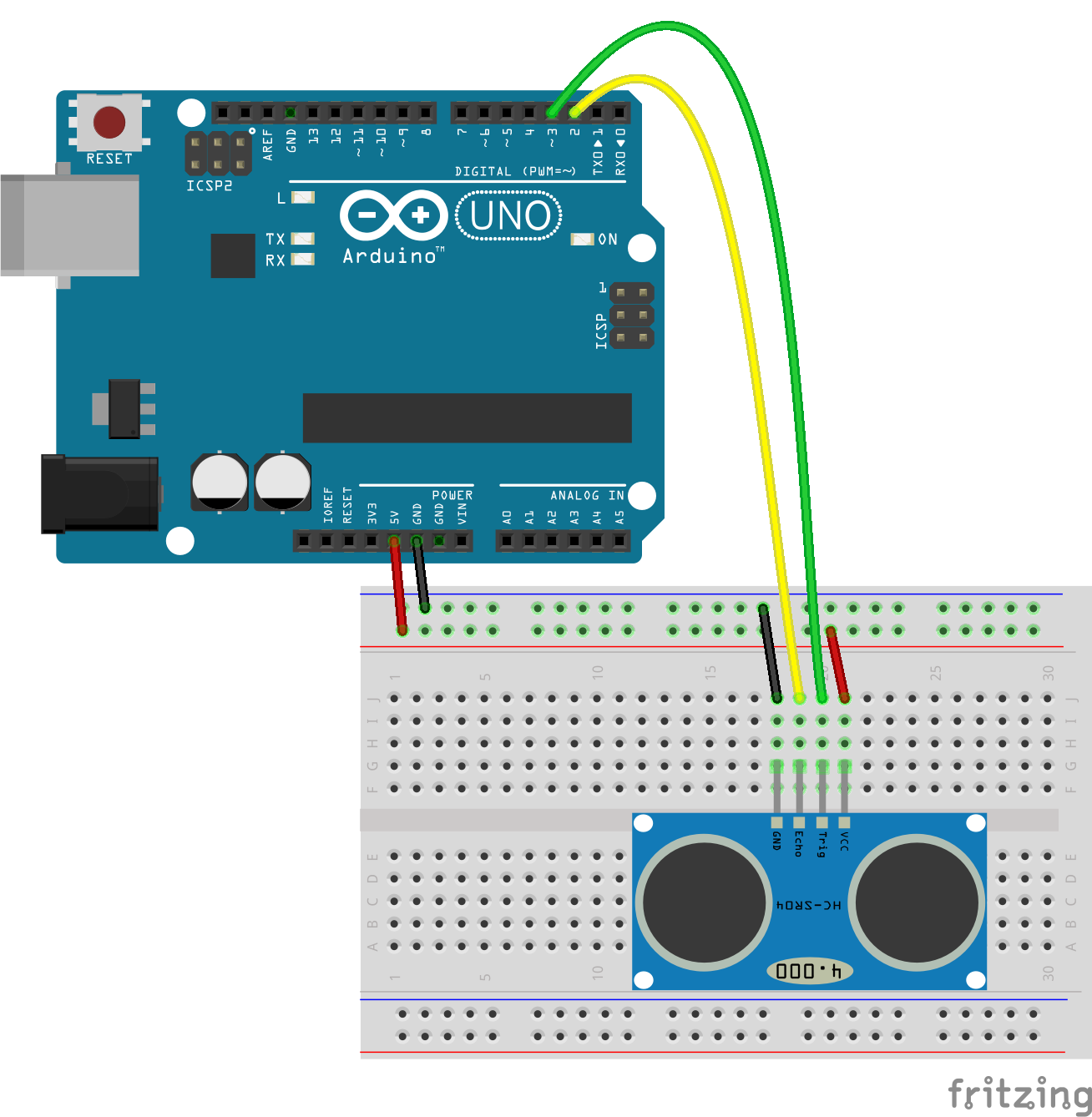
You need to connect 4 pins:
- VCC to 5V
- GND to GND
- Trig to one of the digital pins of the Arduino (pin 3)
- Echo to one of the digital pins of the Arduino (pin 2)
#define TRIG_PIN 3
#define ECHO_PIN 2
long duration;
int distance;
void setup() {
Serial.begin(9600);
// Ultrasonic sensor pinModes
pinMode(TRIG_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
}
void loop() {
// read the HC-SR04 ultrasonic sensor
// the boolean parameter just sets if you want to print the value or not
// the number sets the maximum distance that you want to use. Use 400 or lower.
distance = readUltrasonic(true, 400);
// the manufacturer recommends over 60ms reading cycle
delay(60);
}
int readUltrasonic(bool shouldPrint, int maxDistance) {
// Clear the TRIG_PIN
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
// Set the TRIG_PIN HIGH for 10 microseconds
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
// Read the ECHO_PIN, returns the sound wave travel time in microseconds
duration = pulseIn(ECHO_PIN, HIGH);
// Calculate the distance
// The calculation we use below is an approximation of the real formula:
// duration * 0.034 / 2.0
// (0.017 equals roughly to 1/58)
// We do it this way to avoid having to use floating point numbers.
int tempDistance = duration / 58;
// sometimes the sensor gives strange values. This just ignores all values larger than the maxDistance.
if (tempDistance < maxDistance) {
return tempDistance;
}else{
return distance;
}
}