DC Motors
DC Motors at Aalto Mechatronics #
Standard DC Motors #
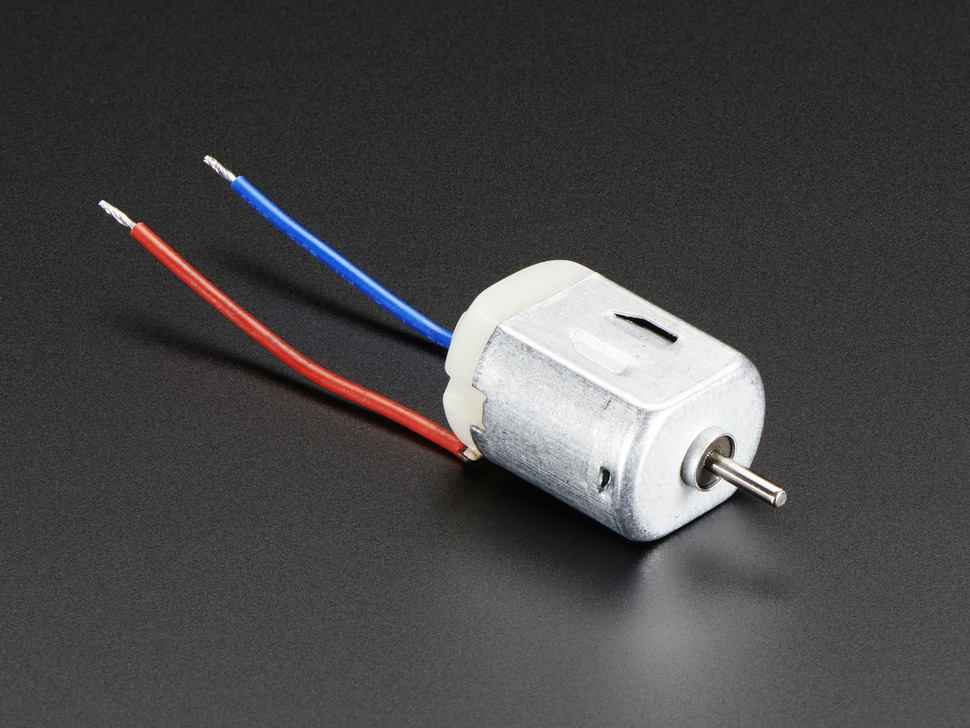
- Usually just 2 wires
- You can control the speed and direction. The direction depends on which terminal of the motor you connect to + and – of your power supply
- Use a transistor or an H-Bridge circuit to control
- On the Arduino you can just use digitalWrite() and analogWrite()
- A standard brushed DC motor usually has a very high rpm, but very low torque. Some sort of gear system is usually required for real-life applications.
TT Motor #
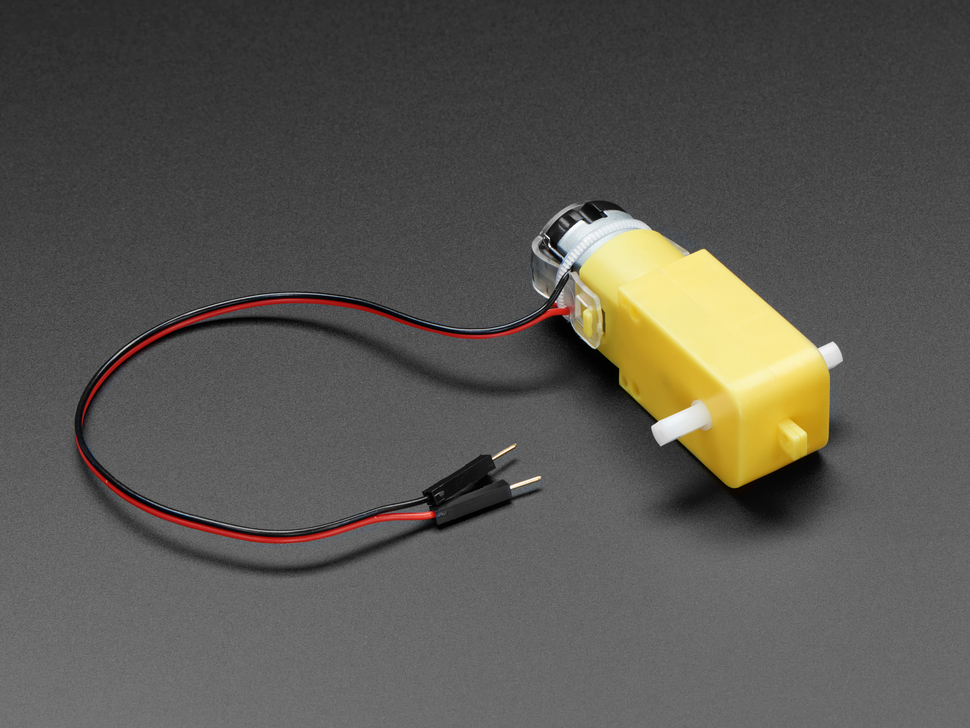
- 3–6V DC
- About 250 rpm
- Cheap
- Plastic gears
- You have these in your Physical Computing kit
12V DC Motors #
- Stronger
- Different gear ratios (slower rpm means higher torque)
- We have at least 50 rpm and 1 rpm motors
How to control DC Motors? #
Powering directly | Switch | Relay (ON/OFF) #
Transistors (ON/OFF and Speed) #
If you want to take one step further in the level of control you can move on to transistors. Transistors can be controlled with a PWM signal to control the speed of a motor. See the Transistor page for more specific details on transistors.
TIP120 #
Here is an example with the
N-Channel Mosfet #
Mosfets are more efficient than standard BJT or Darlington transistors which means that they don’t get as hot and don’t waste as much energy. They need to be connected in a slightly different way than the TIP120 transistor.